RXR-C360D-2 Robo Omnidireksyonèl 3.0



RXR-C360D-2Robo Omnidireksyonèl3.0
| Kontèks pwodwi a: Envestigasyon nan espas danjere, etwat, ak ba yo te toujou trè enpòtan pou envestigasyon anti-teworis ak enspeksyon sekirite. Kounye a, enspeksyon sekirite anti-teworis yo adopte tou enspeksyon santralize pa moun. Metòd enspeksyon sa a pran anpil tan epi li mande anpil travay. Robo san pilòt ka efektivman konplete anba machin nan. Travay enspeksyon nan zòn konplèks tankou kay ak kontenè diminye depans travay epi efektivman reyalize enspeksyon ak eliminasyon endikatè operasyon danjere yo. Nan rekonesans kay, aplikasyon enspeksyon chasi machin sekou otaj nan zòn etwat ak lòt operasyon, pèsonèl aplikasyon an pa ka pase, sa ki lakòz akizisyon enfòmasyon ki pa alè e ki pa egzat, epi li fasil pou retade enfòmasyon enpòtan. Robo san pilòt ka kontwole tiyo, espas etwat, ak machin selon diferan anviwònman. Rekonesans ak akizisyon enfòmasyon enpòtan nan kote tankou chasi. Konpayi nou an toujou respekte teknoloji envestigasyon san moun epi li kontinye prezante nouvo pwodwi envestigasyon san moun. Robo omnidireksyonèl RXR-C360D-2 a adopte wou motè Mecanum, operasyon fleksib, mouvman omnidireksyonèl, vitès rapid, ak ti gwosè, ki ka satisfè egzijans deteksyon pou espas etwat ak ba danjere. |
| 1.Pdeskripsyon pwodwi |
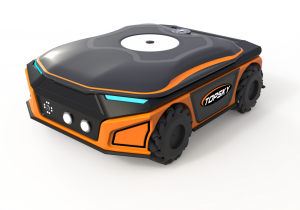
| Robo omnidireksyonèl RXR-C360D-2 a se yon ti robo enspeksyon ki gen yon ti volim epi yon aparans plat. Li sitou itilize pou enspeksyon nan espas etwat ak ba. Li kapab tou elaji pou chaje divès modil detèktè pou detekte zòn sib la. Volan kondwi robo a adopte yon konsepsyon estrikti wou mecanum, ki gen kapasite pou deplase nan nenpòt direksyon ak ang, mouvman fleksib ak operasyon pratik. Robo a chaje ak yon sistèm videyo doub chanèl pou kondwi ak verifye, epi li gen yon fonksyon transmisyon imaj an tan reyèl. An menm tan, rada pou evite obstak devan an ka anpeche robo a frape obstak epi amelyore sekirite itilizasyon an; kontwolè a piti e lejè, ak yon gwo entegrasyon, epi li gen fonksyon kontwòl robo ak akizisyon imaj. Li se robo enspeksyon pwofesyonèl konplè ki ra sou mache a pou espas etwat ak ba. |
| 2.Dimansyon aplikasyon an |
| lEnspeksyon chasi machin lEnspeksyon anba gwo resipyan, etajè, ak resipyan yo lEnspeksyon anba tab ak chèz nan lokal konferans yo lEnspeksyon plizyè lòt espas etwat lEnspeksyon zòn danjere yo |
| 3.Karakteristik |
| 1. ★ Mouvman rapid nan tout direksyon Pwodui sa a itilize wou mecanum, ki ka deplase nan tout direksyon, volan fleksib, epi fasil pou opere. Vitès maksimòm lan ka rive nan 1.5m/s, sa ki ka byen vit rive nan zòn deteksyon an epi ekonomize tan. 2. ★Ti rekonesans espasyal Pwodui sa a piti an gwosè epi li ka detekte ti zòn ki ba ki pa pratik pou pèsonèl obsève. Lantiy vizyon anwo karosri machin nan ka enspekte chasi machin nan. Radar pou evite obstak ki devan karosri machin nan ka evite obstak. 3.★Rechèch ak Sekou Pwodui sa a ka rive byen vit nan zòn danjere ak zòn ki pa pratik pou moun antre epi chèche yo. Kamera vizyon lannwit devan ak dèyè karosri machin nan ka fè pwodui a fonksyone lannwit epi amelyore efikasite rechèch ak sekou yo. 4. ★ Sistèm anti-kolizyon pòtab Robo omnidireksyonèl la ekipe ak yon kamera ak yon rada pou evite obstak nan direksyon pi devan, ak yon kamera ak yon aparèy anti-kolizyon nan direksyon bak, sa ki pote pi gwo sekirite pou pwodwi a. |
| 4.Espesifikasyon prensipal yo |
| 4.1 Paramèt kò robo a: 1. Vòltaj k ap travay: 12V 2.★ Vitès maksimòm deplasman: ≥1.5m/s 3.★ Tan travay: ≥4h 4.★Distans kontwòl: ≥60m 5. ★Pwa chaj: ≥3kg 6.★ Maksimòm ang k ap grenpe: ≥15° 7.★ Wotè maksimòm pou travèse obstak: ≥20mm 8. Batri a ka ranplase: wi 9. Sistèm ekleraj: LED × 8 ekleraj trè klè 4.2 Paramèt kontwòl remote: 1. Ekran ekspozisyon: ekspozisyon 7 pous ak gwo klète 2. Manch operasyon: operasyon doub joystick 3. ★ Dire batri: ≥4h 4. ★Distans kontwòl remote san fil: ≥60m 4.3 Paramèt transmisyon imaj: 1. ★Distans transmisyon imaj: ≥60m 2.★ Kamera pou kondui: lantiy vizyon lannwit devan ak dèyè + lantiy vizyon anlè, ekran an ka chanje |